cheers! j
On Thu, 04 Aug 2016 00:57:45 GMT, Justin Albert wrote:
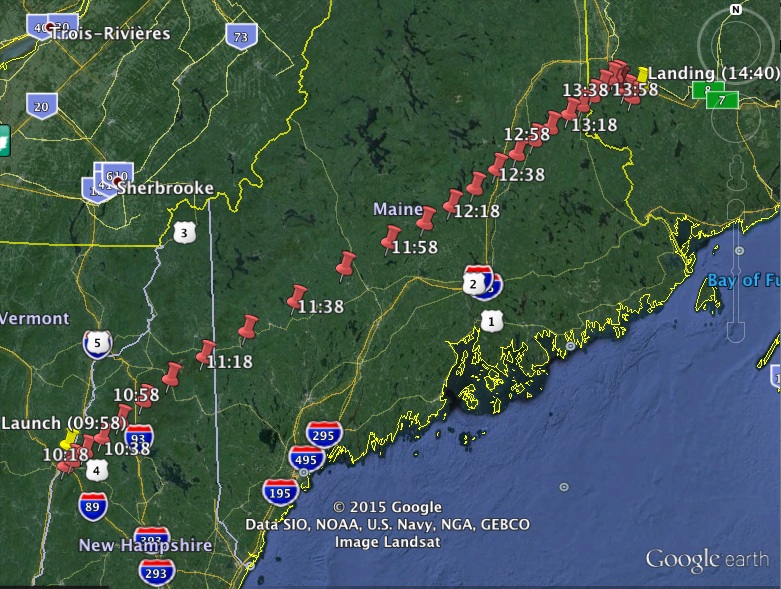
> Hi all, > > Here are minutes of our telecon Thursday July 21, apologies for the > delay! -- please just reply with (or let me know) any corrections -- > thanks! : > > Attendees: Arnold Gaertner (NRC) and me > > The 7 boxes of ALTAIR stuff that were shipped across the country (driven > by me from Hanover NH to Fredericton NB, and then UPS shipped them here > to Victoria) just arrived today (Wed. Aug. 3), and we'll now begin to > assemble stuff here over the upcoming weeks. The boxes contain stuff for > ALTAIR gondolas and payloads; balloons and launch equipment; ground > station antennas, transceivers, and cables; and assembly and lab > equipment. General plan here is to prepare for dummy payload drop tests > this fall, and also to start assembling a real payload for flights this > coming spring (as well as of course software and other necessary work). > > On Sunday July 24, just outside Fredericton, together with my former PhD > student (on the ATLAS experiment at the LHC) Dr. Eric Ouellette (now an > actuary at a major Canadian firm), we attempted to recover the SPOT > Trace that is in a tree in the woods in NB (about a km from a small lake > called Charlie Lake): > > https://particle.phys.uvic.ca/~jalbert/ALTAIRPartyBalloonLaunchTestForNATOApp_Dec2015/BareSPOTTrace18Dec2015-FlightPath.jpg > > however the summer vegetation was very thick (very different than when I > made a similar trip to find it in December!) and this time we were > unable to find it in order to recover it. So it's still up there -- > however I have another SPOT Trace, so it is not urgent to find it. > > The motorized, propelled version of a dummy payload for flight tests via > drops from a tethered balloon is assembled and functioning! -- a video > can be found at > > https://particle.phys.uvic.ca/~jalbert/MotorAndPropTests/MotorizedDummyPayload_6jul16.MOV > > and some photos of the assembly are attached in the links at the bottom > of this message. The propulsion and axle rotation are functioning, > however I still do need to make the parachute/parafoil cutdown system > for it (basically per Yorke's ALTAIR cutdown and parafoil steering > system design), which we will do over the next weeks here in Victoria. > > The hardware for the pre- and post-flight photometry cross-check device > -- the 12" aluminum sphere (a photo of it is attached in a link at the > bottom of this message, > http://www.sharpeproducts.com/store/aluminum-12-dia-sphere ) as well as > the white "Avian-B" Lambertian reflective paint for its interior -- is > currently back in the machine shop here at UVic for machining and > painting. This will be a field photometry check device to, in the field > immediately before launch, and right after recovery, cross-check > photometry information from the ALTAIR gondola (to an accuracy and > precision of about 1% or so. Note that photometry checks which will be > more precise than that will be done in the lab, most precisely at NRC, > and/or NIST -- however we want to have the ability to do quick > cross-checks in the field immediately before and after flight.) Some > renderings (of the upcoming device) are also attached in the attachment > links at the bottom of the message. UVic machinists say that they will > have it ready in approximately a month or two. > > We also now have the hardware for (a completely separate) > survey-tripod-mounted device to cross-check yaw-pitch-roll information > from the gondola (e.g., on days before/after flights) -- a photo of this > hardware is in a link at the bottom. That hardware includes both the > survey tripod ( > http://www.cpotools.com/cst-berger-60-alwi20-o-aluminum-tripod-with-quick-release--orange-/cstn60-alwi20-o,default,pd.html > ), two adjustable angle mounts ( > http://www.thorlabs.com/thorproduct.cfm?partnumber=AP180 ), and a > rotation mount ( > https://www.thorlabs.com/thorproduct.cfm?partnumber=RP01 ). We'll make > the fittings to attach the adjustable angle mounts and rotation mount to > the tripod, and (temporarily pre- or post-flight) to the payload, here > in Victoria. > > We're currently revising the draft initial contractual agreement from > our colleagues at Globalstar Canada regarding 2 initial SPOT Trace > devices (and their service plans) for the educational side-project for > the upcoming NATO SPS application, in which classrooms in elementary and > high schools could launch company-donated SPOT Traces using party > balloons (or a more environmentally-friendly version thereof), and track > them to learn more about winds at different levels in Earth's > atmosphere. > > Karun is working with a sample microcontroller board (with Microchip > PIC18F87J50 microcontroller) from the UVic electronics shop, to use for > testing motor control for an ALTAIR motor and propulsion control > microcontroller board we will be designing this term. He has now gotten > the pulse width modulation code for it up and running -- video at > > https://particle.phys.uvic.ca/~jalbert/MotorAndPropTests/IMG_2136.MOV > > and Karun has also solved the problem of simultaneous control of two > propulsion motors, and of controlling a servo as well as propulsion > motors. He's now working on monitoring the input from the on-chip A/D > converters (which will be monitoring temperatures, motor RPM rates, and > current flow). We just purchased a second little PIC microcontroller > board: > http://www.digikey.ca/product-search/en/programmers-development-systems/accessories/2621524?k=PIC18F97J94 > with a more advanced version of the PIC18F87J50 -- the PIC18F97J94 -- so > that we can test out that new one as well before we make our custom > board with it. We also have the beginnings of a little mechanical test > rig, the internals and externals of which can be found in the four > attached photos, and in the following movie showing the lightweight but > strong servo gearbox for rotation of the propulsion support axle: > > https://particle.phys.uvic.ca/~jalbert/MotorAndPropTests/IMG_2145.MOV > > and now the setup is all together, and just waiting for monitoring > sensors (motor RPM, current, temperature) and microcontroller control: > > https://particle.phys.uvic.ca/~jalbert/MotorAndPropTests/IMG_2198.MOV > > As a backup / cross-check, we are simultaneously trying an Arduino-based > control system (which uses an Atmel ATMega 2560 microcontroller). When > within ALTAIR, the motor and propulsion control microcontroller board > will logic interface with Yorke's main board (in a similar way to how > the present cutdown-motor control board interfaces with the main board. > Separate propulsion battery will of course be carried.) A screenshot of > a propulsion system slow-control and monitoring program which I've been > working on is attached. > > Regarding simulation of the above, James Hartwick (senior undergrad here > at UVic, who has done an enormous amount for ALTAIR, including much of > the current projectaltair.org website, light source work, etc) has now > written an ALTAIR flight propulsion control and simulation program, > which includes GFS (global forecast system) file input, for both > forecast and real-time information of winds at all points in Earth's > atmosphere. We'll have plots, images, and data from his software coming > up very soon. I am developing a visualization interface for this control > and simulation program, which will be based on Google Earth, but display > the real-time (as well as forecasted) winds within Google Earth in a way > that is somewhat similar to this site: > > https://earth.nullschool.net > > I'm working on a streak-vector display of winds within Google Earth that > is reminiscent of the above site, and you can see a first attempt (with > a single streak) here: > > https://particle.phys.uvic.ca/~jalbert/GoogleEarthWindMovie.mov > > and an attempt with multiple streaks here: > > https://particle.phys.uvic.ca/~jalbert/GoogleEarthMultiStreakWindMovie.mov > > Google Earth, while wonderful, is not open source, and does not > presently have a programming interface (it can only be scripted with > .kml files, which cannot, for example, loop over multiple lines of code > in the way a programming interface could). I am thus working on versions > of the above using NASA World Wind, which is an open source and > programmable Google Earth alternative. I have a start on that which can > be seen here: > > https://particle.phys.uvic.ca/~jalbert/NASAWorldWindWithWindsTest_20jul16.mov > > Houman will send Cordell and/or us updated sections of his master's > thesis soon -- that information will be extremely useful to us going > forward. Also, Susana and Nathan, it would be very helpful for us all to > get the JHU students' final writeup when you have a chance. > > Our next grant application will be a NATO "Science for Peace and > Security" application, together with Australian colleague partners. > > That's all I remember, please send things that I forgot. Next telecon > tomorrow (Aug. 4), at 6 pm Eastern time. > > cheers, thanks very much all! > justin > > On Thu, 21 Jul 2016 01:36:55 GMT, Justin Albert wrote: > > > Hi! > > > > Telecon tomorrow (July 21 in North America, July 22 in Australia) at the > > new regular time: 6:00 pm Eastern (3:00 pm Pacific, noon Hawaii, > > midnight European, 8 am Eastern Australia). Discussion items include: > > flight and telescope plans and tests (including planning for flight > > testing outside of New Hampshire); light sources and light source > > modelling; goniometric and pre- and post-flight calibration; propulsion > > work; nanosat bus and payload solid models; computing/website; grant > > applications; and recap of schedules. > > > > Here's how to connect: > > > > 1) Open Skype on your computer (note that of course, you should first install Skype, http://www.skype.com , on your machine if you haven't already). > > 2) In the "Contacts" menu, add me ( jalbertuvic ) as a contact, if you haven't already. > > 3) Just wait for me to Skype-call you at the usual time (4 pm Eastern, 1 pm Pacific). > > 4) If there is any trouble, or if you don't get a Skype-call for some reason and would like to join, just send me an e-mail (jalbert@uvic.ca). > > > > Here's the tentative agenda: > > > > I) Flight and telescope plans and tests, including planning for operations outside of New Hampshire > > II) Diffused light source, and its modelling, pre- and post-flight calibration, and goniometric calibrations > > III) Propulsion & motor control work, and the new motorized dummy payload > > IV) Nanosat solid models & Houman's thesis > > V) Computing/website > > VI) Grant applications > > VII) AOB > > > > Talk to you all tomorrow, thanks! > > justin > > Attachments: > http://projectaltair.org/HyperNews/get/AUX/2016/07/07/13.52-96622-dDummyPayload1_6jul16.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/07/07/13.52-91301-dDummyPayload3_6jul16.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/07/07/13.52-22712-dDummyPayload5_6jul16.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/05/22/18.23-24702-12inAlSphere.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/04/06/16.53-58615-SideView.pdf > http://projectaltair.org/HyperNews/get/AUX/2016/04/06/16.53-48539-TopView.pdf > http://projectaltair.org/HyperNews/get/AUX/2016/05/22/18.23-93827-tch-roll_calibTripod2.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/06/08/18.04-17780-asseminternal3jun16.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/06/08/18.04-71442-assemexternal3jun16.jpg > http://projectaltair.org/HyperNews/get/AUX/2016/05/04/17.45-92797-opulsionMonitoringNew.jpg >
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}